
Исследователи создали робот-мышь с гибким позвоночником
Дата: 2023-12-08 Автор: Dima Zakharov Категории: ТЕХНОЛОГИИ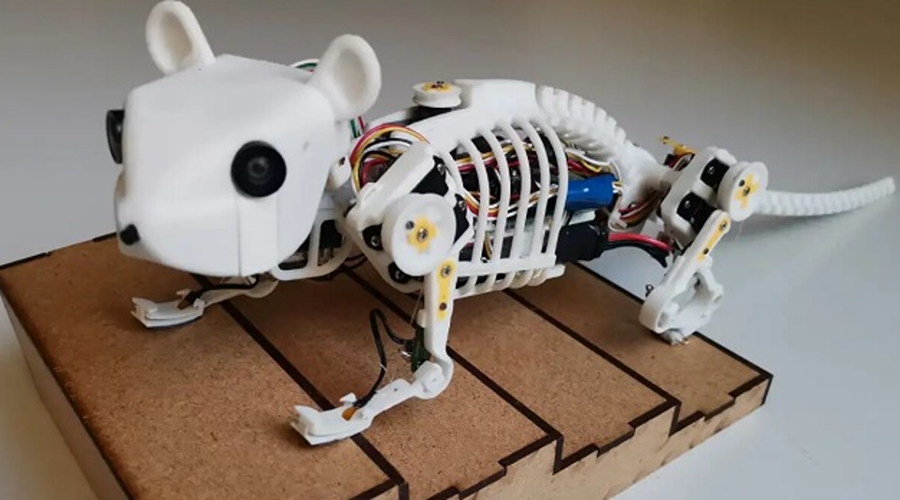
Международная группа исследователей из Германии и Китая представила робота-мышь с гибким позвоночником, продемонстрировавшего впечатляющую ловкость в движениях. Этот прорыв направлен на улучшение понимания четырехногой локомоции на основе механики позвоночника и может открыть путь к созданию более гибких и универсальных роботов. Один из авторов исследования, Бин Жэншань, подчеркнул, что гибкий позвоночник значительно улучшает статическую устойчивость, скорость ходьбы и маневренность робота.
Робот, получивший прозвище "NeRmo", имеет длину 40 сантиметров и весит 225 граммов. Он обладает 13 степенями свободы, что позволяет ему выполнять широкий спектр гибких движений, включая вращения бедер и плеч, сгибание коленей и локтей, гибкость позвоночника, горизонтальные повороты и наклоны головы. Робот создан на основе искусственных нейлоновых сухожилий, разработанных учеными из Технического университета Мюнхена и Университета Сунь Ятсена.
Структура робота включает жесткую переднюю часть с электроникой и позвоночник с четырьмя поясничными отделами и боковыми сочленениями суставов. Искусственные сухожилия в коленных и локтевых суставах позволяют роботу двигаться более похоже на мышь и быстро маневрировать.
Ранее исследователи из Университета Вашингтона (США) разработали автономного робота, способного работать на солнечной энергии и радиоволнах, продемонстрировав непрерывные достижения в области робототехники и их разнообразные применения.









