
Researchers Create Flexible-Spined Robot Mouse
Date: 2023-12-08 Author: Dima Zakharov Categories: TECHNOLOGY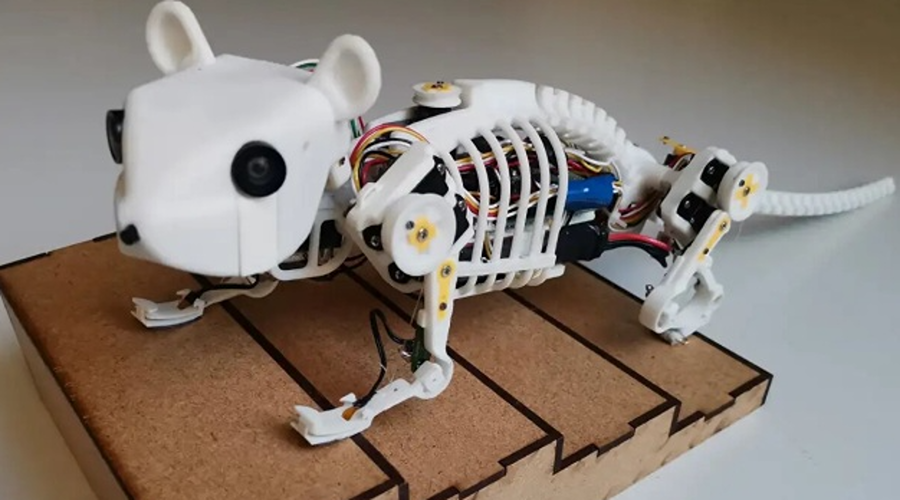
A collaborative effort between researchers from Germany and China has led to the creation of a robot mouse equipped with a flexible spine, demonstrating remarkable agility in its movements. This innovation aims to enhance the understanding of quadrupedal locomotion based on spine mechanics, potentially paving the way for the design of more flexible and versatile robots. Bing Zhengshan, one of the study's authors, highlighted how the flexible spine significantly improves the static stability, walking speed, and maneuverability of the robot.
Nicknamed "NeRmo," the 40-centimeter robot weighs 225 grams and boasts 13 degrees of freedom, enabling a wide range of flexible motions, including hip and shoulder rotations, knee and elbow bends, spinal flexion, horizontal rotations, and head tilts. The robot's construction involves artificial nylon tendons developed by researchers from the Technical University of Munich and Sun Yat-sen University.
The robot features a rigid front structure housing its electronics and a spine equipped with four lumbar sections and lateral joint connections. Artificial tendons incorporated into the knee and elbow joints allow the robot to move more mouse-like and swiftly maneuver through various actions.
Earlier, researchers from the University of Washington (USA) had developed an autonomous robot capable of operating on solar energy and radio waves, showcasing the continuous advancements in robotics and their diverse applications.









